Roachatouille
Python, EMG Signaling, Prosthetics, BMI
Roachatouille is my cockroach-machine interface (CMI) project where I manipulated a severed cockroach leg to model flexion and extension with three colleagues in Modeling, Analysis, and Design I. The theme was inspired by the Disney film, Ratatouille, where our "Remy" (the cockroach chef) performs different actions in the kitchen based on different sensor inputs.
Background
Prosthetics remain the gold standard for amputations, with bioelectric prosthetics offering potential for biomimetic function and fine motor control. However, patient rejection is common, necessitating further innovation in prosthesis design.
Neuroprosthetics explores the interface between the nervous system and machines, particularly at the brain-machine interface (BMI). Using the Blaberus craniifer cockroach, we investigated the role of frequency and amplitude in appendage movement. By applying various sinusoidal waveforms to vivisected legs, we observed effects on maximum angle change and angular velocity. Frequency influenced movement type and velocity linearly, while amplitude inversely affected both parameters. This study highlights the potential of a single-neuron modality for advancing prosthesis design.
Experimental Design
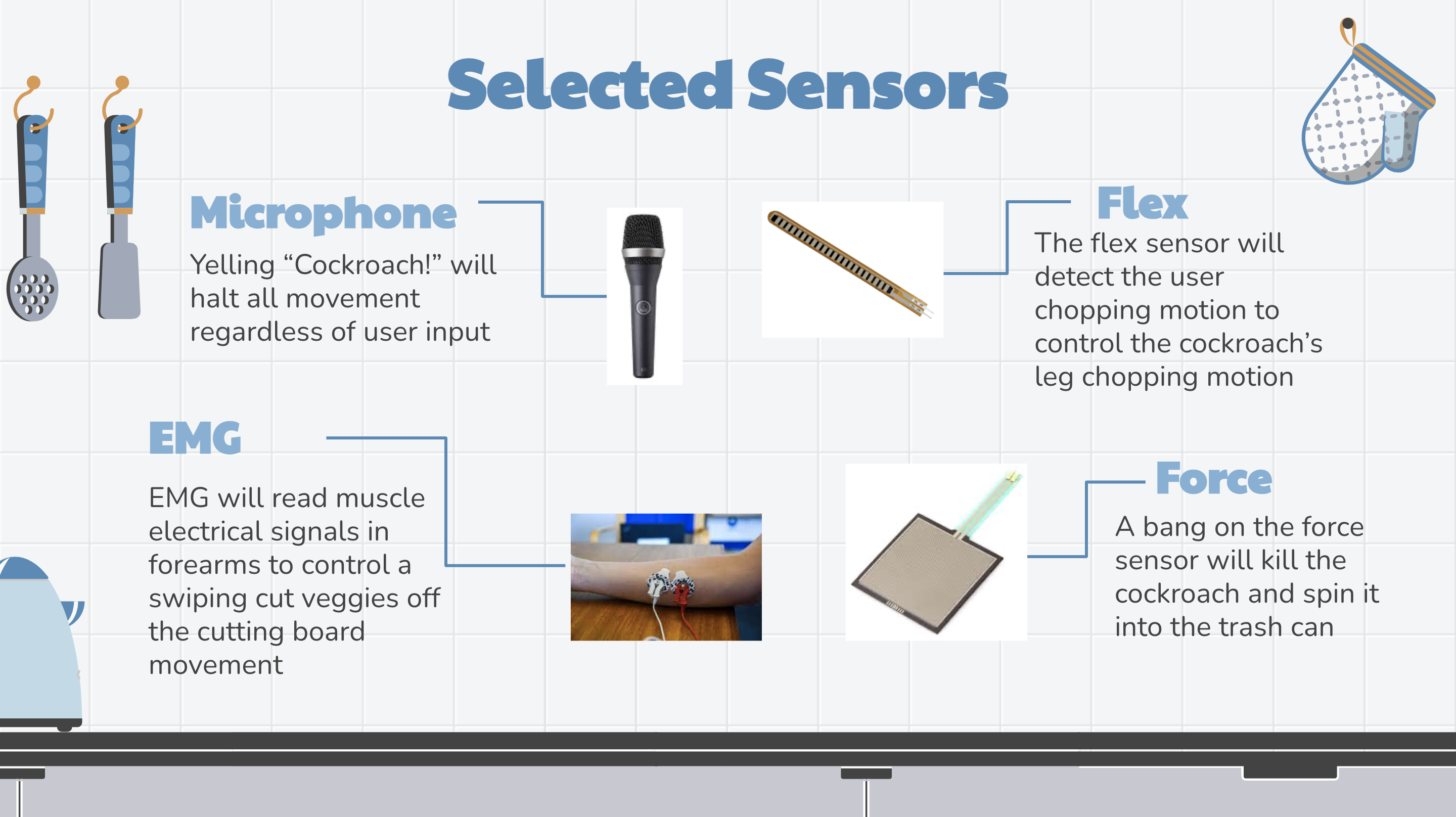
Microphone
A microphone decibel threshold was applied to pause all types of motions for 30 seconds.
EMG Signaling
EMG signal thresholding was applied to perform a rotation in the stepper motor by 45 degrees, demonstrating 'clearing' the cutting board.
Flex Sensor
The flex sensor was used to demonstrate the chopping motion, where the leg would contract and extend by stimulating the leg with a waveform.
Force Sensor
The force sensor enabled a 180 degrees rotation of the sepper motor to move the chef into the trashcan.